
The BML UAV Formation Flight Simulation software is used in pilot training and in mission planning.
There are many advantages to using a formation of UAVs, rather than a single UAV, to perform a mission.
- Reduced time to complete a mapping mission, since multiple UAVs can fly line abreast to map a much wider swathe, so the results are provided more quickly.

The BML Mission manager software provides the staff at the Ground Control Station (GCS) with real time situational awareness and the ability to control any, or several, unmanned aircraft flying in a formation.
- Increased probability of completing the mission, since the failure of one UAV in the formation does not stop the mission – there is a graceful degradation in capability and it will take longer to complete the mission, with fewer unmanned aircraft.
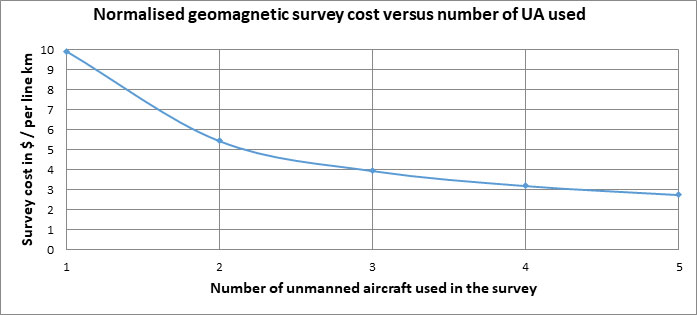
- Reduced mission cost, as the mission cost is dominated by the salaries of the three people at the GCS (Pilot - in - Command, Safety Co-Pilot and the Payload Operator). The staff costs will be spread over the UAVs in the formation and, because of the number of UAVs involved, the duration of the mission will be shorter, so the mission cost will be a lot less.
On-board machine intelligence is essential to detect statistically significant anomalies
- On board machine intelligence on each UAV reduces the amount of information that needs to be relayed from the UAV to the GCS, and reduces the number of payload operators needed at the GCS to monitor the detection of statistically significant anomalies (such as people, vehicles and / or weapons)
- Machine intelligence is used on each UAV, to interpret video data from visible spectrum machine vision cameras and from thermal imaging cameras, in real time
- The hardware and the software for use in machine intelligence applications are both progressing rapidly, as a result of the global interest in the development driverless vehicles

Rather than have one payload operator per unmanned aircraft in a formation of UAVs, we use machine intelligence to interpret sensor data in real time on each unmanned aircraft, to detect statistically significant anomalies and then only relay information when an anomaly is detected.