Tilt wing unmanned aircraft
Tilt rotor and tilt wing aircraft configurations promise a vertical take-off capability coupled with an efficient flight performance.
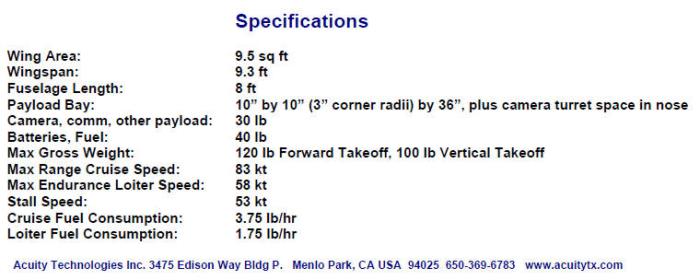
The Acuity Technologies Tilt Wing Unmanned Aircraft

Above: The Acuity Technologies tilt wing unmanned aircraft on display at the AUVSI North America 2010 Conference.
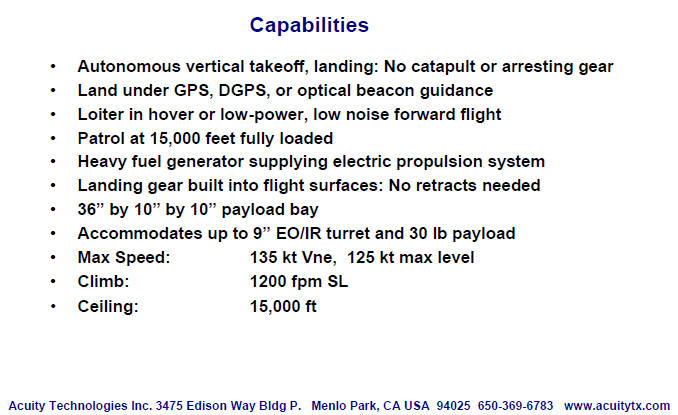
Above and below from http://www.acuitytx.com/pdf/AT-10%20Brochure.pdf
The NASA Tilt Wing Unmanned Aircraft
The three rotor NASA tilt wing Unmanned Aircraft, as displayed at the AUVSI Conference 2008 in San Diego.
Fully autonomous quad tilt wing Unmanned Aircraft makes maiden flight
A fully autonomous quad tilt wing (QTW) unmanned air vehicle has made its first successful take-off, forward flight and landing.
The Chiba University -developed UAV, capable of carrying a 5 kg payload, made the flight in February. It has been in development since 2004, funded by Japanese company GH Craft . The UAV has a mass of 23 kg, a wingspan of 1 m and is 1 m long. It has a top speed of 81 kt (150 km/h) and an endurance of 15 minutes. The prototype's rotors are electrically driven using batteries.
"We now want to make many types of QTW for the many different missions," says Chiba University department of electronics and mechanical engineering professor Kenzo Nonami, speaking on Friday 14 March at the 1st US-Asian demonstration and assessment of micro aerial and unmanned ground vehicle technology, held in Agra, India.
Describing an original mission concept for QTW of polar observation, Nonami also wants to develop a smaller, 500 g version of the QTW.
By Rob Coppinger
The Tilt Wing UAV

